Z+F PROFILER® 9020
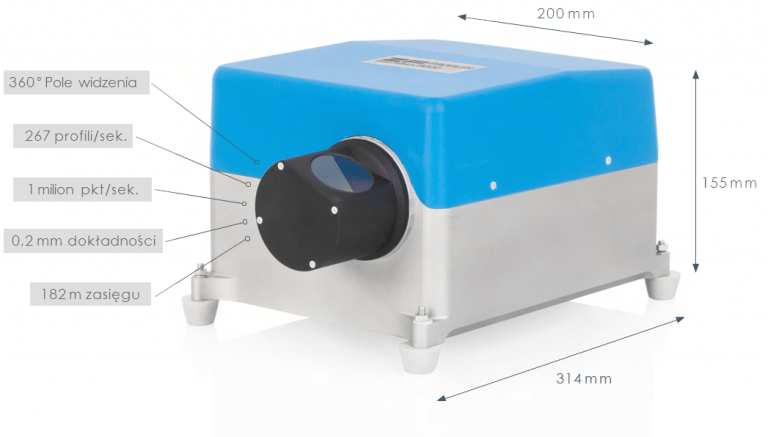
Z+F PROFILER® 9020 jest wysokowydajnym skanerem laserowym 2D do zastosowań w mobilnym mapowaniu. Prędkość obrotowa Z+F PROFILER® 9020 wynosi 267 Hz lub maksymalnie 16 020 obr/min. Mierzy on do 182 m i charakteryzuje się bardzo wysoką jakością danych. Do zbierania danych w bliskiej odległości, jest wyposażony w specjalną optykę. W porównaniu z poprzednimi modelami (Z+F PROFILER® 9012 A/M) posiada wewnętrzną płytkę referencyjną, bardzo niski pobór mocy, bardzo szybki czas rozruchu oraz zredukowaną o ponad 50% wagę i rozmiary.

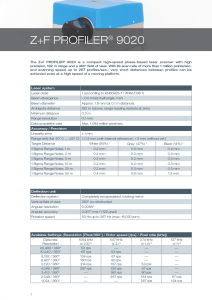
Z+F PROFILER® 9020 Parametry techniczne
Zasięg 182 metry
Bezpieczeństwo dla oczu dzięki laserowi klasy 1
Stopień ochrony IP55 (odporność na kurz i wodę)
Wysoka precyzja
Prędkość obrotowa od 50 Hz do 267 Hz
Temperatura pracy -10 do +50 °C
Pole widzenia 360°
- Łatwa integracja z systemem kamer Z+F MapCam® S / C
Prędkość obrotowa Z+F PROFILER® 9020 wynosi 267 Hz lub maksymalnie 16.020 obr/min. Mierzy on do 182 m i charakteryzuje się bardzo wysoką jakością danych. Nowa, bardzo wydajna technologia laserowa i udoskonalone algorytmy zapewniają bardzo dokładne wyniki pomiarów na szynach, drogach, znakach ulicznych i innych systemach kontroli ruchu, takich jak sygnalizacja świetlna.
Z+F MapCam® S i C
Dzięki nowym systemom kamer firmy Zoller + Fröhlich, informacje kolorowe mogą być w jednym kroku odwzorowane w danych mierzonych przez Z+F PROFILER® 9012 oraz Z+F PROFILER® 9020 .
Systemy kamer Z+F MapCam® S i C posiadają czujniki o wysokiej rozdzielczości, bardzo szerokie pole widzenia i obejmują cały obszar pomiarowy.
Duża liczba klatek na sekundę w kamerach umożliwia bezluzowe i ostre obrazy przy prędkości do 100 km/h.
Kamery są łatwe w instalacji za pomocą jednego narzędzia. Ponadto można je stosować z dowolnym mobilnym systemem mapowania (MMS).

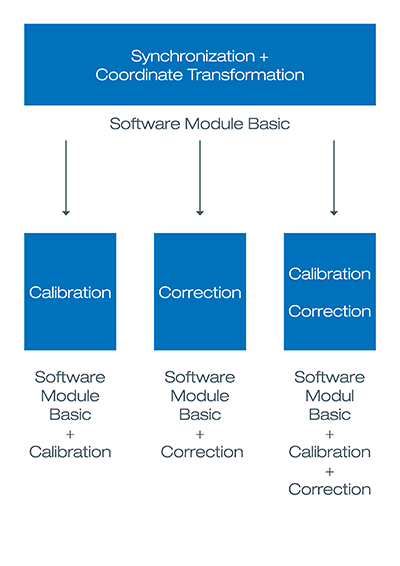
Z+F SynCaT
Synchronizacja
Synchronizacja danych skanera laserowego Z+F PROFILER® 9012 oraz 9020 z danymi trajektorii i generowanie plików punktów 3D w chmurze punktów.
Przetwarzanie
Przetwarzaj dane chmury punktów 3D do różnych lokalnych układów współrzędnych i zastosuj różne lokalne / globalne modele korekcji wysokości (pliki korekty geoidy)
Kalibracja
Przetwarzanie parametrów kalibracyjnych spowodowane różną integracją systemów (translacja, odchylenia rotacji między układami współrzędnych jednostki nawigacyjnej (trajektoria) a skanerem laserowym Z + F PROFILER® 9012/9020)
Korekta
Indywidualne oszacowanie odchyleń odnoszące się do wstępnie zdefiniowanych punktów kontroli naziemnej (GCP’s)
Do pobrania
Dane techniczne
Z + F PROFILER® 9020
Broszura
Z + F PROFILER® 9020
Broszura
SynCaT
Menu